







【提 要】
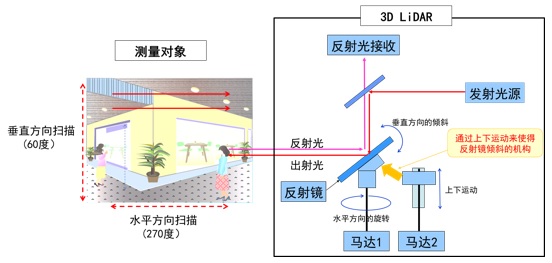
松下电器产业株式会社 汽车电子和机电系统公司开发出了三维距离传感器3D LiDAR[1],它能够正确计测直至周围物体的距离和方向。本开发品通过采用独立结构的激光扫描技术,实现了垂直方向60度、水平方向270度的广角扫描。通过扩大距离计测空间,为自律移动机器人[2]的稳定行驶做出贡献。

【效 果】
本开发品垂直方向的计测范围特别广,在应用于自律移动机器人时,可正确检测路面上的障碍物和路面的凹凸状态。此外,由于可改变扫描范围和分辨率,因而可实现适合于利用场景的计测,为加速在人往来的设施内和户外行驶的自律移动机器人的普及做出贡献。
【特 点】
本开发品应用采用独立结构的激光扫描技术,具有以下特点。
1. 实现广范围的三维距离计测(垂直方向60度、水平方向270度)
2. 可进行垂直方向的扫描范围、分辨率的任意设定
3. 即使在日照环境下也可进行高精度计测
【过去示例】
要使得机器人在人往来的设施内和户外自律移动,不仅需要把握机器人的前方、左右方向,而且还需要把握路面状况。车载用途中使用的3D LiDAR,由于激光的垂直扫描范围不足,依靠单一传感器未能正确把握路面状况,结果需要与其他传感器进行组合。因此,曾面临行驶控制系统的构成复杂的课题。
【用 途】
自律移动机器人(自动搬运机、送货机器人等)、叉车、农业机械、建筑机械、安防系统
【实用化】
样品出货预定:2018年1月
【备 注】
本产品将于2017年10月3日~10月6日在幕张国际展览馆举办的“CEATEC JAPAN 2017”上展出。
【商品咨询】
オートモーティブ&インダストリアルシステムズ社 インダストリアル事業開発センター
e-mail: [email protected]
【特点的说明】
1. 实现广范围的三维距离计测(垂直方向60度、水平方向270度)
车载用途中使用的3D LiDAR,对于希望检测广范围以及路面状况的工业用途中提出的要求,未能通过单一传感器来应对。本公司通过有效利用在光盘驱动器事业中培植起来的光学设计技术和马达控制技术,开发出了采用独立结构的激光扫描技术,通过单一光源实现了垂直方向60度、水平方向270度的广角扫描。由此,可借助于单一传感器来进行广范围的三维距离计测,无需与其他传感器进行组合,可简化自律移动机器人的行驶控制系统的构成。
<本公司激光扫描技术 概要图>
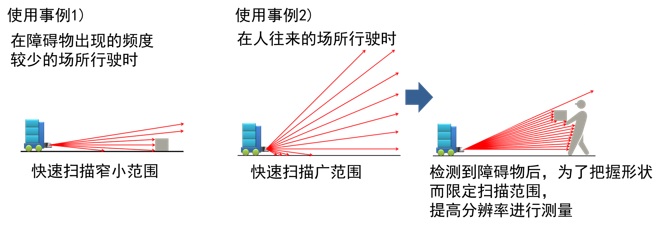
2. 可进行垂直方向的扫描范围、分辨率的任意设定
自律移动机器人上,根据行驶场所和时间等环境,障碍物检测所需的范围会发生变化。譬如,在路面没有凹凸,障碍物出现的频度少的场所行驶时,要求做到无需详细检测路面状况,根据机器人的行驶速度快速地对窄小范围进行扫描。一方面,在人往来的场所行驶时,要求把握从路面直至相当于机器人高度的广范围的状况。进而,在检测到障碍物时,有时还需要把握障碍物的详细形状。本开发品通过采用独立结构的激光扫描技术,可以从多种模式中设定垂直方向的扫描范围和分辨率。由此,可通过适合于利用场景的扫描范围和分辨率来进行距离计测,实现机器人稳定且有效的行驶。
<使用事例>
3. 即使在日照环境下也可进行高精度计测
在户外使用机器人时,要求即使在日照环境下也能够使用。本开发品通过将发射激光和遇到物体反射光的路径设计在同一个光学路径上的技术手段减轻太阳光引发的噪声,即使在相当于盛夏烈日高照的100,000勒克斯[3]的照度下也可进行高精度的计测。
<日照环境下的测量结果>
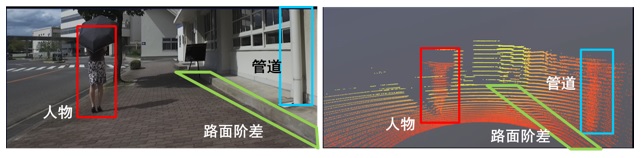
(左:摄影机图像、右:本公司3D LiDAR计测结果)
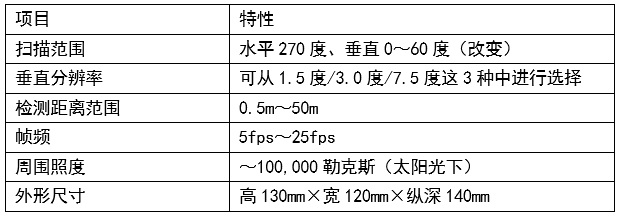
【开发品的规格】
【术语说明】
[1] LiDAR (Light Detection and Ranging)
根据照射出的激光碰到对象物,反射的光返回为止的时间来计测距离的传感器。
[2] 自律移动机器人
基于从相机,GPS,测距传感器等各种设备得到的图像及位置信息达到追踪路径,避开障碍物的同时,移动到事先决定的目的地的自律行走型机器人.在自动搬运以及送货到户等不断扩大的市场应用上被期待
[3] 勒克斯
从光源发出的激光,照射到物体时的明亮程度的定量化采用的,所谓的照度的基本单位